// GALLERY
.png)
.png)
.png)
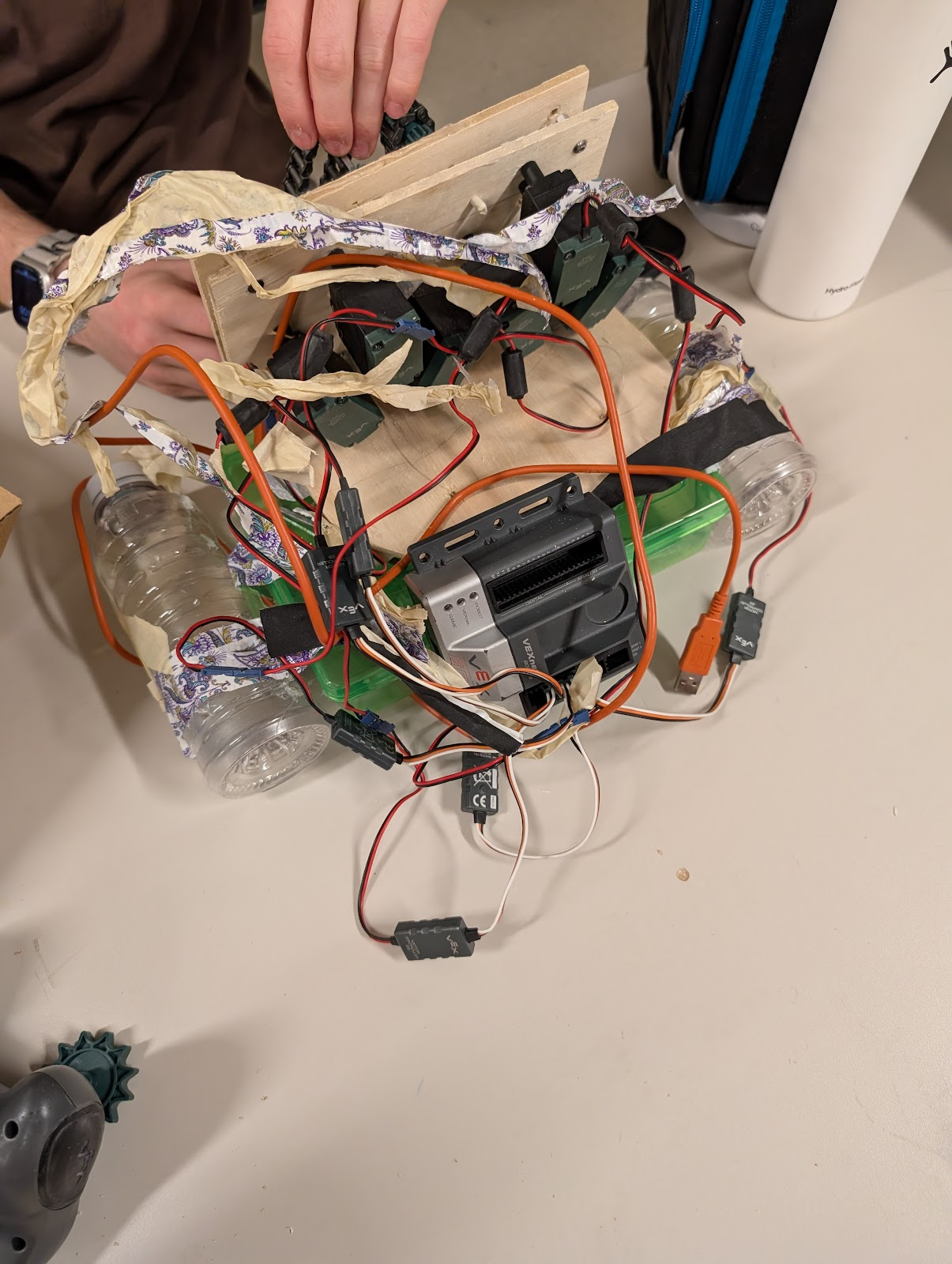
VEX motor powered floating robot involving gear ratios and circuits.
Create a robot that floats, maneuvers in water, and pushes an opponent into a wall before being pushed into one. Build fits within a 1-foot cube; electronics are ≥1.5" above the water.